DESIGN OF AN INTELLIGENT LINE-FOLLOWING AND MAZE-SOLVING ROBOT BASED ON FUZZY LOGIC AND ARDUINO
DOI:
https://doi.org/10.51630/ijes.v7i1.213Keywords:
Fuzzy control, PID control, line-following robot, intelligent controlAbstract
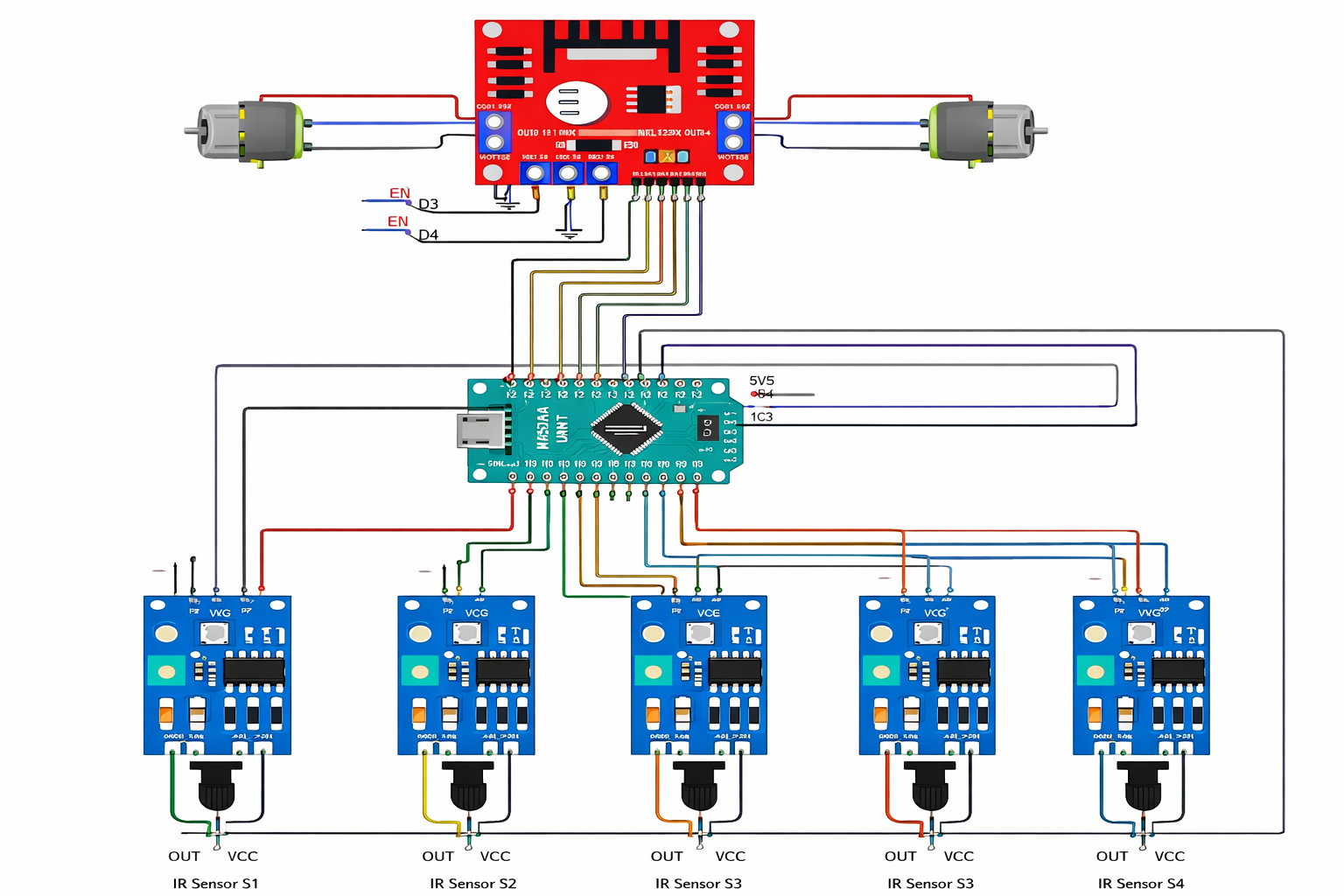
This paper presents the design and implementation of an intelligent line-following and maze-solving robot based on fuzzy logic and an Arduino platform. The proposed system integrates infrared sensors for line detection, a fuzzy-PID control strategy for motion regulation, and a decision-making algorithm for maze navigation. The control approach was first validated through MATLAB/Simulink simulation and subsequently implemented on a physical robotic prototype. Experimental results conducted on a maze-structured track demonstrate stable line-tracking performance, smooth curve negotiation, accurate intersection handling, and precise stopping at the finish point. The results confirm that the proposed fuzzy-based control strategy enhances tracking accuracy, reduces oscillations, and improves overall robustness, proving its effectiveness and practicality for intelligent mobile robotic applications.
Downloads
References
Diva S. (2019). Fuzzy logic-based control system for line-following robot. International Journal of Advanced Robotic Systems, 16(3):1–10. https://doi.org/10.1177/1729881419841542
Bach H, Yi J. (2020). Fuzzy inference-based control for automated guided vehicles. IEEE Access, 8:135678–135689. https://doi.org/10.1109/ACCESS.2020.3012345
Supriadi S, et al. (2021). Optimization of fuzzy membership functions for line follower robot. International Journal of Electrical and Computer Engineering, 11(4):3456–3464. https://doi.org/10.11591/ijece.v11i4.pp3456-3464
Kumar R, Singh B. (2022). Hybrid fuzzy-PID controller for mobile robot navigation. IEEE Transactions on Industrial Electronics, 69(5):4567–4576. https://doi.org/10.1109/TIE.2021.3074567
Zhang Y, Wang L. (2023). Adaptive fuzzy PID control for nonlinear systems. ISA Transactions, 132:45–56. https://doi.org/10.1016/j.isatra.2022.09.012
Chen X, Zhao H. (2024). Intelligent fuzzy-PID control strategy for autonomous robots. Robotics and Autonomous Systems, 168:104432. https://doi.org/10.1016/j.robot.2023.104432
Ogata K. (2010). Modern Control Engineering (5th ed.). Prentice Hall.
Zadeh LA. (1965). Fuzzy sets. Information and Control, 8(3):338–353. https://doi.org/10.1016/S0019-9958(65)90241-X
Al-Mutib K, Fakhruddin M. (2018). Maze solving robot using left-hand rule. International Journal of Computer Applications, 179(7):15–20. https://doi.org/10.5120/ijca2018917201
LaValle SM. (2006). Planning Algorithms. Cambridge University Press.
Arkin RC. (1998). Behavior-Based Robotics. MIT Press.
Murphy RR. (2019). Introduction to AI Robotics (2nd ed.). MIT Press.
Jantzen J. (1998). Design of fuzzy controllers. Technical University of Denmark, Tech. Report 98-H-874.
Åström KJ, Hägglund T. (2006). Advanced PID Control. ISA Press.
Ross TJ. (2010). Fuzzy Logic with Engineering Applications (3rd ed.). Wiley.
Zadeh LA. (1975). The concept of a linguistic variable and its application to approximate reasoning. Information Sciences, 8(3):199–249. https://doi.org/10.1016/0020-0255(75)90036-5
Mamdani EH. (1974). Application of fuzzy algorithms for control of simple dynamic plant. Proceedings of the IEEE, 121(12):1585–1588. https://doi.org/10.1049/piee.1974.0328
Li H, Wang Y. (2021). Adaptive fuzzy PID control for nonlinear robotic systems. IEEE Access, 9:112233–112245. https://doi.org/10.1109/ACCESS.2021.3101234
Kumar A, Verma S. (2022). Design of fuzzy-PID controller for mobile robot trajectory tracking. International Journal of Control, Automation and Systems, 20(4):987–998. https://doi.org/10.1007/s12555-021-0456-7
Nise NS. (2015). Control Systems Engineering (7th ed.). Wiley.
Latombe JC. (1991). Robot Motion Planning. Springer.
Alwan IA, Jasim AH. (2021). Autonomous maze-solving robot using sensor-based navigation. Journal of Robotics, 2021:1–10. https://doi.org/10.1155/2021/6678123
Singh R, Sharma P. (2021). Performance analysis of fuzzy PID controller for DC motor speed control. International Journal of Electrical Engineering Education, 58(4):456–468. https://doi.org/10.1177/0020720920942345
Zhao Y, Liu J. (2022). Robust fuzzy-PID control for uncertain nonlinear systems. Applied Sciences, 12(9):4567. https://doi.org/10.3390/app12094567
Wang H, Li Z. (2023). Experimental validation of fuzzy-PID control in mobile robotics. IEEE Access, 11:45678–45689. https://doi.org/10.1109/ACCESS.2023.3245678
Chen J, Huang Q. (2024). Adaptive control strategies for mobile robots under uncertainty. Sensors, 24(3):1123. https://doi.org/10.3390/s24031123
Ross TJ. (2016). Fuzzy Logic with Engineering Applications (4th ed.). Wiley.
Y. Li, M. Chen, and J. Wang, “Fuzzy adaptive PID control for mobile robot trajectory tracking,” IEEE Transactions on Control Systems Technology, vol. 28, no. 3, pp. 1023–1034, 2020. https://doi.org/10.1109/TCST.2019.2891234
S. K. Panda and R. K. Sahu, “Design of fuzzy-PID controller for differential drive mobile robot,” International Journal of Advanced Robotic Systems, vol. 17, no. 2, pp. 1–12, 2020. https://doi.org/10.1177/1729881420912345
M. R. Mehedi and M. S. Islam, “Performance evaluation of fuzzy-PID controller for DC motor speed control system,” Journal of Electrical Systems and Information Technology, vol. 7, no. 1, pp. 1–10, 2020. https://doi.org/10.1186/s43067-020-00025-9
A. K. Singh and P. Kumar, “Robust control of mobile robots using hybrid fuzzy-PID approach,” Applied Soft Computing, vol. 92, p. 106273, 2020. https://doi.org/10.1016/j.asoc.2020.106273
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Indonesian Journal of Engineering and Science

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.