EXPERIMENTAL ANFIS-FUZZY CONTROLLER FOR BALL AND BEAM SYSTEM
DOI:
https://doi.org/10.51630/ijes.v7i1.206Keywords:
Ball and Beam, ANFIS, Fuzzy Control, Nonlinear Control, Experimental ValidationAbstract
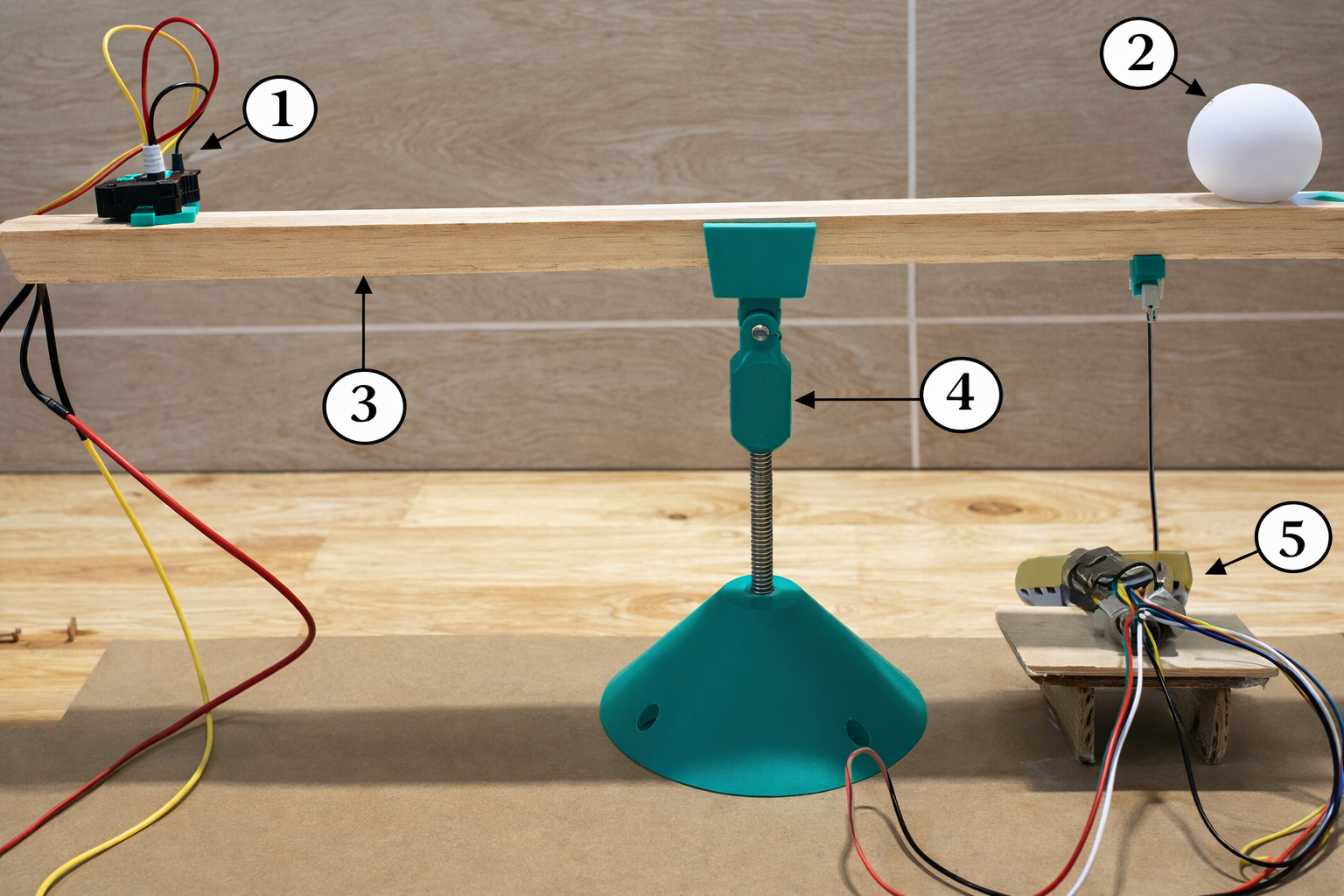
This paper presents the development of an Adaptive Neuro-Fuzzy Inference System (ANFIS) controller for a mid-pivot Ball and Beam system. The nonlinear dynamic model is derived using Euler–Lagrange formulation, followed by DC motor modeling to construct the full state-space system. An ANFIS controller is trained from PID-generated data to enhance adaptability under nonlinear conditions. Simulation and hardware experiments validate the controller’s performance. Results show that the proposed controller can stabilize the system with reasonable accuracy, although overshoot and oscillation remain. Directions for improving intelligent control and hardware design are discussed.
Downloads
References
N. S. Ahmad, “Modeling and Hybrid PSO-WOA-Based Intelligent PID and State-Feedback Control for Ball and Beam Systems,” IEEE Access, vol. 11, pp. 137866–137880, 2023, doi: 10.1109/access.2023.3339879.
M. Saad, K. Mustafa, A. Alsharef, and N. Hdood, “Performance Analysis of Ball and Beam System using Modern Control Techniques,” WSEAS Trans. Syst. Control, vol. 19, pp. 465–472, 2024, doi: 10.37394/23203.2024.19.49.
T. R. D. Kumar and S. J. Mija, “Mathematical modelling of ball and plate system with experimental and correlation function-based model validation,” Control Theory Technol., vol. 22, no. 2, pp. 326–341, 2024, doi: 10.1007/s11768-024-00208-8.
A. Umar et al., “Performance Comparison of the Ball and Beam System using Linear Quadratic Regulator Controller,” PID Control Linear Nonlinear Ind. Process., 2023, doi: 10.5772/intechopen.110513.
V.-H.-L. Tran et al., “Backstepping Control for Ball and Beam: Simulation and Experiment,” J. Fuzzy Syst. Control, vol. 3, no. 1, pp. 30–38, 2025, doi: 10.59247/jfsc.v3i1.275.
N. M. Tahir, L. A. Yekinni, and U. I. Bature…, “Control and stability studies of ball and beam system,” Proc. of the Journal…, 2019.
N. Godfrey, H. Li, Y. Ji, and W. Marcy, “Real Time Fuzzy Logic Controller for Balancing a Beam-and-Ball System,” Int. Ser. Intell. Technol., pp. 157–185, doi: 10.1007/978-0-585-28000-4_6.
M.-Q. Nguyen et al., “Fuzzy Controller from Experts’ Rules for Middle Axis Ball and Beam,” J. Fuzzy Syst. Control, vol. 1, no. 3, pp. 80–84, 2023, doi: 10.59247/jfsc.v1i3.94.
undefined Hue Cam Tang, undefined Minh Duc Dang, and undefined Nga To Thi Nguyen, “Fuzzy logic-based control for nonlinear dynamics in the ball and beam system,” Int. J. Sci. Res. Arch., vol. 14, no. 2, pp. 442–450, 2025, doi: 10.30574/ijsra.2025.14.2.0392.
T.-T. Hoang et al., “A Method of Fuzzy Algorithm in Controlling Ball and Beam through Simulation and Experiment,” Robot. & Manag., vol. 26, no. 2, pp. 3–8, 2021, doi: 10.24193/rm.2021.2.1.
X. Yang, D. Wu, C. Wang, C. Gao, H. Gao, and Y. Liu, “Adaptive fuzzy PID control of high-speed on-off valve for position control system used in water hydraulic manipulators,” Fusion Eng. Des., vol. 203, p. 114437, 2024, doi: 10.1016/j.fusengdes.2024.114437.
A. K. Mohapatra, S. Mohapatra, P. C. Sahu, and S. Debdas, “Modeling of flexible AC transmission system devices and fuzzy controller for automatic generation control of electric vehicle-injected power system,” e-Prime - Adv. Electr. Eng. Electron. Energy, vol. 7, p. 100483, 2024, doi: 10.1016/j.prime.2024.100483.
L. Panta, “Comparative Analysis of NMPC and Fuzzy PID Controllers for Trajectory Tracking in Omni-Drive Robots: Design, Simulation, and Performance Evaluation,” Int. J. Fuzzy Syst., vol. 27, no. 6, pp. 1691–1701, 2024, doi: 10.1007/s40815-024-01866-1.
M. Tajjudin, N. S. Pezol, and M. H. F. Rahiman, “Design and Evaluation of Self-Tuning Fuzzy PID Controller with Reference Model for Ball and Beam Mechanism,” Int. J. Emerg. Technol. Adv. Eng., vol. 12, no. 8, pp. 196–203, 2022, doi: 10.46338/ijetae0822_23.
N. S. Abdul Aziz, M. Hezri Fazalul Rahiman, N. Ishak, R. Adnan, and M. Tajjudin, “Design of Fuzzy PID Controller with Reference Model for Ball and Beam Mechanism,” 2019 IEEE Int. Conf. Autom. Control Intell. Syst., pp. 194–198, 2019, doi: 10.1109/i2cacis.2019.8825012.
M. K. Saleem, M. L. U. Rahman Shahid, A. Nouman, H. Zaki, and M. A. U. Rehman Tariq, “Design and implementation of adaptive neuro-fuzzy inference system for the control of an uncertain ball and beam apparatus,” Mehran Univ. Res. J. Eng. Technol., vol. 41, no. 2, pp. 178–184, 2022, doi: 10.22581/muet1982.2202.17.
A. Kharola, “Novel adaptive control for avoiding fuzzy rule explosion in nonlinear systems,” Int. J. Autom. Control, vol. 17, no. 4, pp. 377–396, 2023, doi: 10.1504/ijaac.2023.131740.
R. Khan, F. M. Malik, A. Raza, N. Mazhar, H. Ullah, and M. Umair, “Robust Nonlinear Control Design and Disturbance Estimation for Ball and beam System,” 2020 3rd Int. Conf. Comput. Math. Eng. Technol., pp. 1–6, 2020, doi: 10.1109/icomet48670.2020.9073936.
G. Lai, S. Zou, H. Xiao, L. Wang, Z. Liu, and K. Chen, “Fixed-time adaptive fuzzy control with prescribed tracking performances for flexible-joint manipulators,” J. Franklin Inst., vol. 361, no. 7, p. 106809, 2024, doi: 10.1016/j.jfranklin.2024.106809.
P. Zhuang, P. Zuo, S. Huang, J. Feng, R.-Y. Wang, and H.-S. Chen, “Research on Control Scheme Based on Ball & Beam System,” Int. J. Adv. Eng. Res. Sci., vol. 10, no. 10, pp. 82–98, 2023, doi: 10.22161/ijaers.1010.8.
A. Kharola, undefined Rahul, and V. Pokhriyal, “PID based ANFIS control of Inverted Double Pendulum System,” 2022 Second Int. Conf. Next Gener. Intell. Syst., pp. 1–5, 2022, doi: 10.1109/icngis54955.2022.10079899.
W. Li-Xin, “Design of adaptive fuzzy controllers for nonlinear systems by input-output linearization,” NAFIPS/IFIS/NASA ’94. Proc. First Int. Jt. Conf. North Am. Fuzzy Inf. Process. Soc. Biannu. Conf. Ind. Fuzzy Control Intell. Syst. Conf. NASA Jt. Technol. Wo, pp. 89–93, doi: 10.1109/ijcf.1994.375144.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Indonesian Journal of Engineering and Science

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.