PID-CONTROLLED HUMAN DETECTION ROBOT WITH VISUAL PROCESSING ON ALPHABOT-2
DOI:
https://doi.org/10.51630/ijes.v6i2.176Abstract
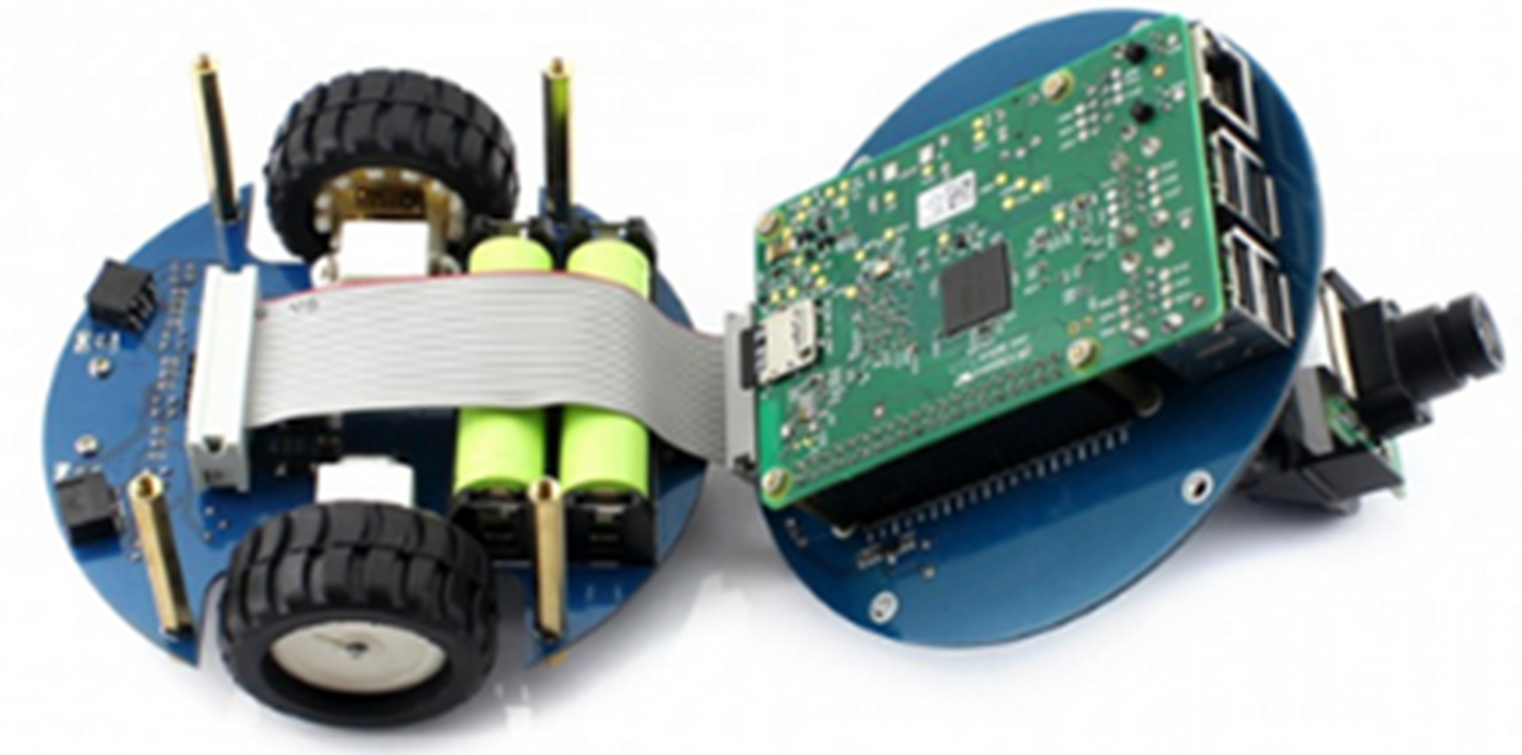
This paper presents a human detection and alert robot system based on the AlphaBot2 platform and Raspberry Pi. The system employs a camera with a HOG-based human detection algorithm to locate the target within the frame and uses an ultrasonic sensor to measure the distance to the person. Based on the horizontal offset between the person and the frame centre, the PID controller adjusts the speeds of two DC motors to guide the robot smoothly and steadily toward the person. When the robot reaches a predefined distance from the detected human target, a buzzer is triggered. Through experiments, the effectiveness of the image processing and PID algorithm is evaluated, and optimal parameter values are identified for the system.
Downloads
References
Shal T.A. et al (2013), “ Intelligent surveillance robot”, in 2013 International Conference on Electrical Communication, Computer, Power, and Control Engineering (ICECCPCE), doi: 10.1109/ICECCPCE.2013.6998745
Mohammed M.N. et al (2018), “ Design and Development of Pipeline Inspection Robot for Crack and Corrosion Detection”, in 2018 IEEE Conference on Systems, Process and Control (ICSPC), doi: 10.1109/SPC.2018.8704127
Shu Y. et al (2020), “ The design of rescue robot based on disaster rescue”, in 2020 International Conference on Innovation Design and Digital Technology (ICIDDT), doi: 10.1109/ICIDDT52279.2020.00054
Redmon J. et al (2016), “ You Only Look Once: Unified, Real-Time Object Detection”, in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), doi: 10.1109/CVPR.2016.91
Shuai Q. et al (2020), “ Object detection system based on SSD algorithm”, in 2020 International Conference on Culture-oriented Science & Technology (ICCST), doi: 10.1109/ICCST50977.2020.00033
Chauhan R. et al (2018), “ Convolutional Neural Network (CNN) for Image Detection and Recognition”, in 2018 First International Conference on Secure Cyber Computing and Communication (ICSCCC) ,doi: 10.1109/ICSCCC.2018.8703316
Dalal N. et al (2005), “ Histograms of oriented gradients for human detection”, in 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), doi: 10.1109/CVPR.2005.177
Hearst M.A. et al (1998), “ Support vector machines”, in IEEE Intelligent Systems and their Applications, vol.13, no.4, doi: 10.1109/5254.708428
Shekhar A. et al (2018), “ Review of Model Reference Adaptive Control”, in 2018 International Conference on Information , Communication, Engineering and Technology (ICICET), doi: 10.1109/ICICET.2018.8533713
Gintautas N. et al (2007),“ Autonomous Mobile Robot Control Using Fuzzy Logic and Genetic Algorithm”, 2007 4th IEEE Workshop on Intelligent Data Acquisition and Advance Computing Systems: Technology and Applications, doi: 10.1109/IDAACS.2007.4488460
Bemporad A. (2007), “ Model Predictive Control Design: New Trends and Tools”, in Proceedings of the 45th IEEE Conference on Decision and Control, doi: 10.1109/CDC.2006.377490
Ang K.H. et al (2005), “PID control system analysis, design, and technology”, in IEEE Transactions on Control Systems Technology, vol.13, no.4, doi: 10.1109/TCST.2005.847331
Shi Z. (2002),“ Auto-tuning of reference model based PID controller using immune algorithm”, Computational Intelligence, Proceedings of the World on Congress on, pp. 483-388,doi: 10.1109/CEC.2002.1006282
Mohamed T.L.T. et al(2010),“ Development of Auto Tuning PID Controller Using Graphical User Interface (GUI) ”, 2010 Second International Conference on Computer Engineering and Applications (ICCEA 2010), vol.1, doi: 10.1109/ICCEA.2010.101
Live H.J. et al (2017),“Simulation Research of Fuzzy Auto-Tuning PID Controller Based on Matlab”, 2017 International Conference on Computer Technology, Electronics and Communication (ICCTEC), pp. 180-183, doi: 10.1109/ICCTEC.2017.00047
Xu L. et al (2016), “ Design of the PID controller for industrial processes based on the stability margin”, in 2016 Chinese Control and Decision Conference (CCDC), doi: 10.1109/CCDC.2016.7531552
Chen X. et al (2019), “ Modeling and Simulation of Vehicle Braking System Based on PID Control”, in 2019 IEEE 10th International Conference on Software Engineering and Service Science (ICSESS), doi: 10.1109/ICSESS47205.2019.9040743
Shi J. et al (2022), “ Research on control of medical permanent magnet synchronous Motor based on fuzzy adaptive fractional order PID”, in 2022 3rd International Conference on Computer Vision, Image and Deep Learning & International Conference on Computer Engineering and Applications (CVIDL & ICCEA), doi: 10.1109/CVIDLICCEA56201.2022.9824616
Carmona R. et al (2018), “ Stable PID Control for Mobile Robots”, in 2018 15th International Conference on Control, Automation, Robotics and Vision (ICARCV), doi: 10.1109/ICARCV.2018.8581132
Downloads
Published
Issue
Section
License
Copyright (c) 2025 Indonesian Journal of Engineering and Science

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.